Механика (Теория механизмов и машин) – страница 10
 ,
,  ,
,  окажется равным …
окажется равным …
Совокупность поверхностей, линий или точек, по которым происходит подвижное соединение двух звеньев, образующих кинематическую пару, называется _____________ кинематической пары.
Изображение кинематической схемы механизма в определенном масштабе, соответствующее заданному положению начального звена, называется …
Плоский рычажный механизм, реализующий заданную функциональную зависимость между положениями входного и выходного звеньев или между их перемещениями, называется …
Зависимость углового или линейного перемещения точки или звена механизма от обобщенной координаты называется …
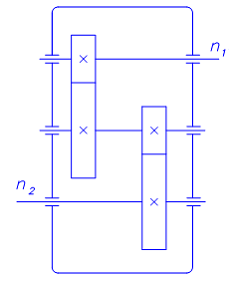
Передаточное отношение редуктора i при известных скоростях вращения ведущего n1 и ведомого валов n2 вычисляется по формуле …
Математическое выражение основного критерия качества проектируемого механизма называется …
Механизм, предназначенный для воспроизведения заданной функциональной зависимости между перемещениями входного и выходного звеньев, называется …
Угол между вектором силы, приложенной к ведомому звену, и вектором скорости точки приложения движущей силы называется …